AI/ML Operations
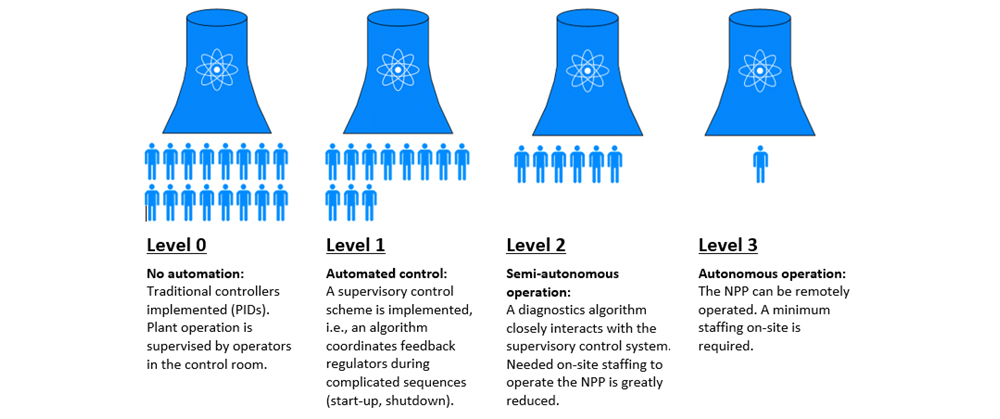
In addressing operations, one needs to differentiate between autonomous operation and automated operation. The former involves exercising judgement, in this case by a machine, to arrive at a decision while the latter involves executing the control task that is the consequent of the decision. That control task is defined as part of a maintenance procedure or an operating procedure. The accompanying figure shows an arrangement of building blocks for achieving autonomous operation.
Under autonomous operation, the exercising of judgement and then of making a decision can be organized according to the type of anomaly. There are slow changing equipment faults that require either maintenance actions or system capacity reduction to preserve component health. In either case there is a procedure to be executed and its identity can be established through the use of quantitative reasoning to diagnose the fault. On the other hand, there are fast changing faults that require control actions or equipment reconfiguration to avert a shutdown. The appropriate mitigating procedure can be identified through the use of qualitative reasoning to diagnose the fault.
Here we presuppose the above and describe control algorithms for use in a procedure to accomplish an operating or maintenance objective.
Performance Prediction
Maintenance and operating procedures have at their root some performance objective that has an associated metric whose value needs to be predicted. This prediction can be ether data-driven or physics-based.
Physics-Based
A physics-based model can provide an estimate for a performance metric that is not directly observable such as a measure of the efficiency of a system or an unmeasured process variable. The model if appropriately formulated can not only capture the underlying physics but provide degrees of freedom that permit it to be brought into alignment with actual system measurements. This offer the best of both worlds.
Recent results for this approach are described at Power Conversion System where a state-space model for a physical system is used to obtain a best estimate for an unmeasured process variable by regressing the model against real time plant data. This estimate is needed to affect proper control of the system.
Data-Driven
For those physical phenomena that are complex and not amenable to first principles modeling a data-driven approach may be the preferred approach. The approach is suited for applications where traditional physics-based modeling approaches do not provide acceptable accuracy or are not sufficiently well developed. The degree of model detail can be tailored to match the diversity and availability of operating data such that a model with good generalization properties is realized.
Recent results for this approach are described at BWR Moisture Carryover where a performance metric is composed from the output of a data-driven digital twin that is trained on plant data. The performance metric is used to adjust and guide operation to improve plant efficiency.
Model-Based Control and Optimization
Given a metric for system performance and a means to measure it, a control system provides the capability to manipulate actuators to maximize performance.
Hierarchical Control
The concept of hierarchical control can be used to realize plant-wide coordinated control for a plant composed of multiple interacting systems with each system controlled by a single-input single-output controller. Specifically, this method has application to control of a power plant during normal operation where plant electrical output is adjusted in response to changes in grid demand. A recent application is described at Advanced Reactor.
System Control with Hard Constraints
Some control problems exhibit hard constraints that must be enforced to protect plant investment. We have encountered this type of problem in systems where there are multiple and diverse physical plants that need to be coordinated collectively toward a common objective in the face of exogenous variability.
A recent application is described at Integrated Energy System.
Upset Recovery
Plant equipment faults and grid upset events, including those that presently result in transients that challenge the protection system, might be better managed using advanced operator aids. There are clear safety and economic advantages if the probability that an upset will lead to an unplanned shutdown can be reduced or if the plant response to an upset can be mitigated such that transient-induced thermal stresses are reduced. Presently an operator’s response to events is driven by paper-based procedures: a sensor sends a signal to an alarm panel in the main control room; after consulting written procedures operators adjust controls to rectify the fault.
A more informed operator working with procedures that are executed in a semi-automated manner has the potential to stabilize the plant in a more timely and precise manner and thereby avert a shutdown and temper transient-induced thermal fatigue. The approach requires fault detection and diagnosis followed by a realignment control action. The MSET code was developed for the detection problems but its data-driven approach limits its applicability to fault diagnosis. To address the fault diagnosis task, the PRO-AID code is being developed. Model-based predictive control methods are being developed to address control realignment.
Diagnosis of Fast-Acting Faults
While detection of a fault can be accomplished using data-driven methods, difficulties arise when these methods are applied to fault diagnosis. Such an approach requires actual plant fault data or simulation data for training purposes. Given the absence of physics information, the training space takes in all conceivable faults and for each, varying degrees of fault severity. One is unlikely obtain this data from the actual plant so simulations are needed which means each plant must have its own model, which is a difficult business case since need subject matter expert to prepare 1-D system code input. This plethora of faulted scenarios must be provided a priori for network training.
An alternate method has been developed that does not suffer from these limitations. The approach relies on trending of variables using physics information and qualitative reasoning and parallels the thought process of the human operator. He method renders an explainable and verifiable diagnosis. See PRO-AID for additional information.
Results of the method are given at Diagnosis of Fast-Acting Faults.
Model-Based Predictive Control
Some performance optimization problems involve additional complexities such as system operation over a non-linear region, regulation of process variables that are not measured, or multiple process variables to be simultaneously regulated during transients that excite dynamics. These control problems can be addressed through model-based predictive control where a digital twin represents the dynamic behavior of the system and is embedded in an optimization procedure that generates the actuator inputs that provide the desired regulation.
A recent application is described at Large Load Rejection Event.